|
Durée 1h30. Tous documents autorisés.
30 Mai 2002
|
|
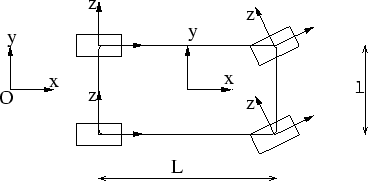
Le modèle possède les degrés de liberté (DDL) suivants:
Nous représentons la voiture par un graphe de scène au moyen de noeuds de types suivants:
Dans chaque noeud de repère, on fera apparaître (en écrivant leurs noms) les DDL qu'il contrôle, ainsi que les valeurs L et l.
Question 1(4 points)
Représentez la voiture par un graphe de scène, en supposant que tous les DDL sont indépendants. Si possible, n'utilisez qu'un seul noeud Roue .
En réalité, les DDL de la voiture ne sont pas indépendants. On utilisera par la suite les hypothèses suivantes:
Question 2(6 points)
Représentez la voiture par un graphe de scène, en faisant apparaître ses cinq DDL dans les noeuds corresondants. Chaque DDL ne doit apparaître que dans un seul noeud.
|
Question 3(4 points)
Pour chaque DDL, modélisez par des courbes de Hermite la trajectoire suivie ainsi que le contrôle de vitesse. On néglige la distorsion dûe au paramétrage, et on ne s'intéresse pas aux dates exactes des événements, qu'on placera arbitrairement sur l'axe du temps.
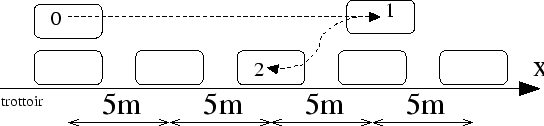
Le redémarrage s'effectue après un certain temps. Il consiste à repasser de la position 2 à la position 1 en accélérant progressivement.
Question 4(2 points)
Reprenez la question précédente, en l'appliquant à l'action de redémarrage.
Nous désirons implanter le comportement suivant:
Les voitures garées sont disposées régulièrement tous les 5 mètres le long d'un trottoir rectiligne orienté suivant l'axe x de la scène (fig. 2). Un tableau de booléens libre représente les places libres: libre[i] vaut vrai si et seulement si il y a une place libre centrée en x=5*i.
Le temps est représenté par une variable t .
Question 5(4 points)
Représentez graphiquement un automate de contrôle du comportement de la voiture. Précisez à quelle phase du mouvement correspond chaque état, et faites apparaître les conditions de transition.