
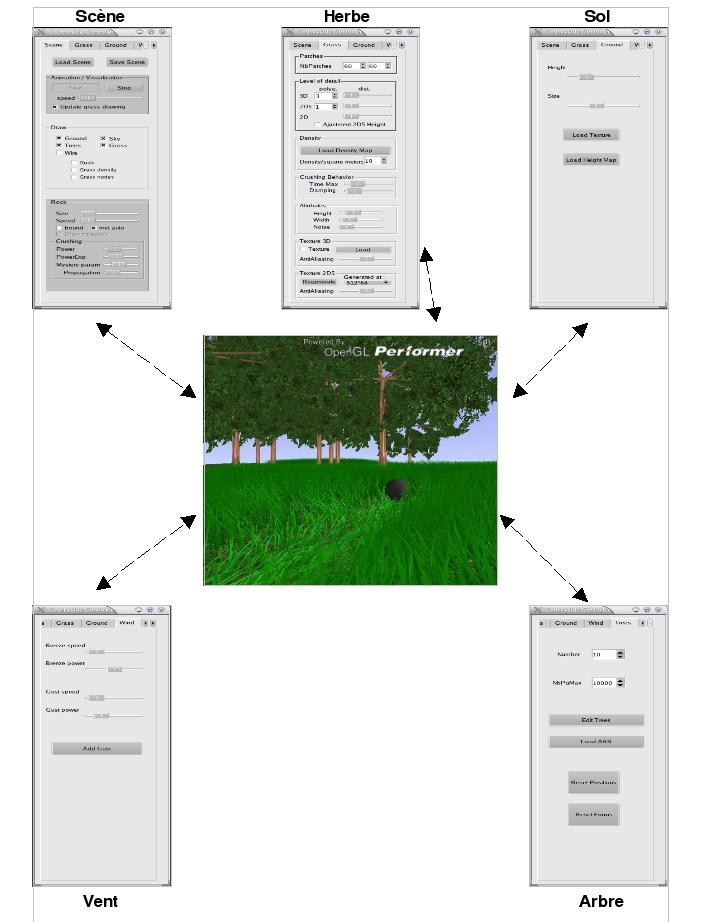
Dans le cadre de ce projet, l'équipe EVASION a pour but de fournir un environnement naturel dans lequel se déplaceront les créatures bayésiennes. Pour cela, nous avons porté sous OpenMask (choisi comme plate-forme logicielle du projet) nos résultats de simulation de prairie obtenus en collaboration avec l'équipe SHARP/LAPLACE.
Le portage a été réalisé par Sébastien Laborie au cours d'un stage d'été 2003. Les résultats principaux, plus détaillés dans son rapport, sont: