Thèse :
Modélisation multi-échelle procédurale de scènes animées
En résumé :
De 2000 à 2004, j'ai passé 3 ans et demi dans l'équipe évasion sous la direction de Marie-Paule Cani.
Ma thèse est comprise dans le très vaste domaine de l'informatique graphique, et plus précisément dans le sous-domaine de la modélisation et le rendu de scènes 3D.
Voici une vulgarisation des définitions de chacun des termes apparaissant dans ma thèse :
Modélisation : en synthèse d'image, la modélisation consiste à décrire une forme 3D animée dans un langage compréhensible par l'ordinateur.
Par exemple, une voiture sera représenté par un maillage, c'est à dire une liste de triangles.
Scènes complexes animées : une scène 3D peut-être plus ou moins complexe.
Intuitivement, il est clair qu'une vaste étendue d'herbe animée par le vent est bien plus délicate à modéliser qu'une table, par exemple.
Même s'il est difficile de mesurer scientifiquement la complexité d'une scène, il est clair que certaines sont beaucoup plus difficiles à créer que d'autres.
Pour estimer la complexité d'une scène, de nombreux critères rentrent en jeux tels que l'animation, la précision, la structure, la fonction d'éclairage...
Multi-échelle : d'après la définition précédente, une table est un objet simple alors qu'une prairie est beaucoup plus compliquée.
À l'échelle où l'on imagine ces deux objets, ces considération paraissent raisonnables.
Pourtant, si l'on se rapproche beaucoup de la table, on verra apparaître les fibres de bois, dont la structure est assez compliquée.
Inversement, en s'éloignant de la prairie, on ne verra plus qu'un simple surface lisse et verte.
L'échelle d'observation influe énormément sur la perception que l'on a du monde. Le but de cette thèse et de modéliser (et d'afficher) des mondes virtuels avec de très grandes variations d'échelle : c'est la modélisation et le rendu multi-échelle.
Pour fixer les idées, le but que l'on se fixe (et qui, précisons-le, n'est pas encore atteint) et de créer un monde virtuel dans lequel on puisse zoomer d'une galaxie vers un des atomes qui la constitue.
Procédurale : on a vu dans la définition de modélisation que durant la phase de création d'un objet, on le décrit par un langage compréhensible par l'ordinateur.
Ce langage descriptif peut-être plus ou moins sophistiqué.
Par exemple, la description d'un maillage requiert un langage simple puisque c'est une simple énumération de triangles.
D'autres représentations plus complexes seront dites procédurales.
Par exemple, une fractale est parfois décrite par une équation.
Le volume de donnée de la définition est très plus petit, alors que le langage nécessaire pour représenter des équations mathématiques permet d'écrire des expressions beaucoup plus subtil qu'une simple énumération.
Les langages procéduraux sont généralement très puissants mais malheureusement difficile à utiliser.
La principale contribution de ma thèse consiste à utiliser comme langage descriptif un langage extrêmement permissif et efficace : le C++.
Concrètement, un modèle 3D est "tout simplement" décrit par du code C++ (est ultérieurement par une librairie dynamique).
Les degrés de liberté offert par un tel choix sont aussi prometteurs que difficile à dompter.
Adapté à la multi-échelle, le langage descriptif que nous proposons impose un type de modélisation bien particulier.
Un objet est décrit par une forme grossière et par une ensemble de fonction qui vont lui rajouter localement de la précision en fonction de l'observation.
Un moteur de rendu dédié permet de n'afficher que les partie pertinents du modèles : les détails trop fin et les parties non-visible sont ignorées.
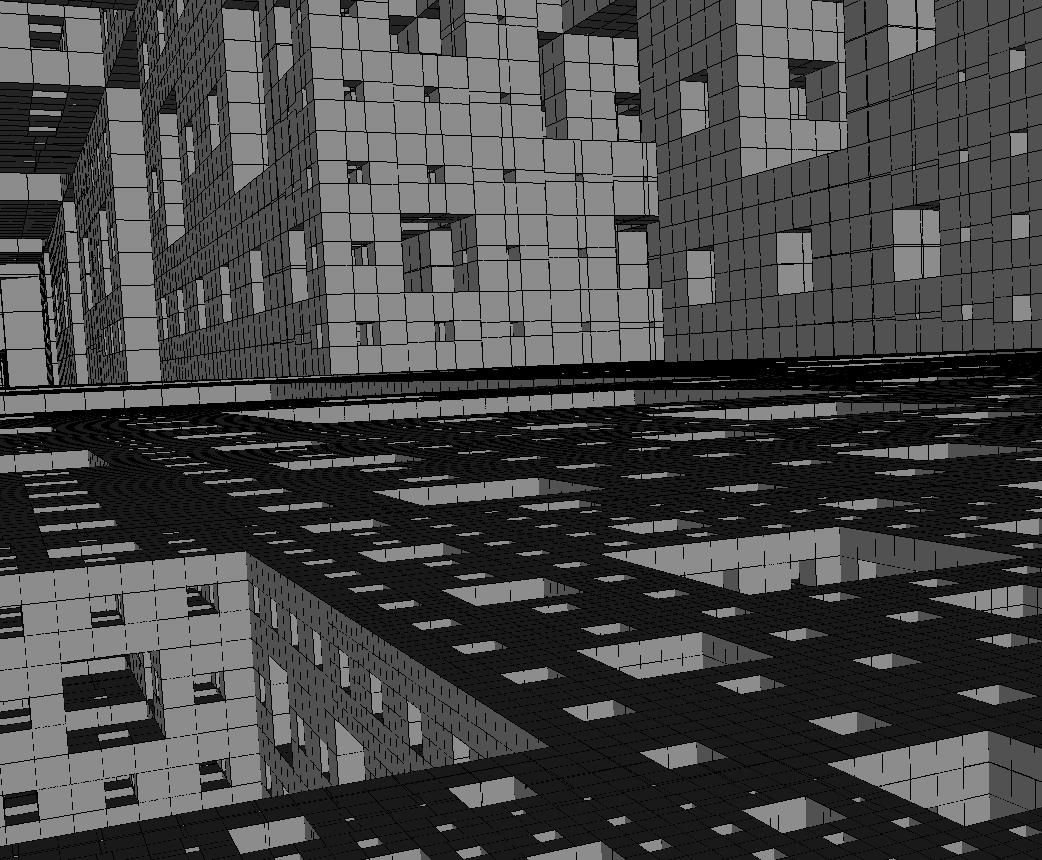
Le cube de Sierpinski :
Image (1) : cas du cube de Sierpinski. Seul les éléments pertinents sont affichés. Grâce à cela, l'affichage s'effectue en temps-réel.
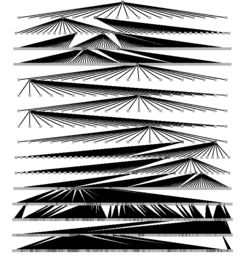
Image (2) : rappelons qu'un modèle est défini par des fonctions qui ajoute de la précision à une forme initiale. Dans le cas du cube de Sierpinski, une seule fonction suffit. Chaque noeud de ce graphe représente l'application de cette fonction en un endroit et une échelle particulière de l'objet.
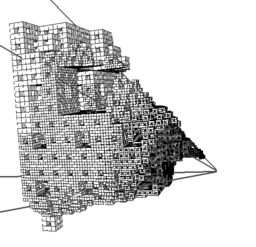
Image (3) : un critère de précision permet de générer de plus en plus de précision pour satisfaire l'observation.
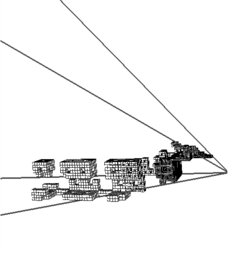
Image (4) : en plus de la précision, un algorithme de détection d'occlusion permet, en temp-réel et sans aucun précalculs, de n'afficher que les parties visibles de l'objet.
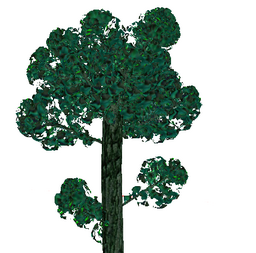
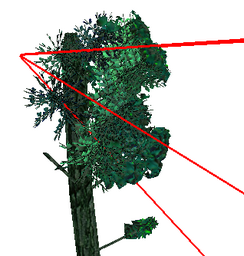
Un modèle d'arbre animé multi-échelle :
Lien :
html
pdf
ps compressé
présentation de ma soutenance de thèse (slithy).
Frank Perbet home page