Modélisation 3D biomécanique simplifiée du
mouvement animal et estimation de paramètres à partir de
la vidéo
Encadrants:
Lionel
Reveret, projet EVASION,
INRIA, Grenoble (responsable de stage)
Laurent
Favreau, projet EVASION, INRIA, Grenoble
Contact: lionel.reveret@inria.fr

|
|
|
Image
originale
|
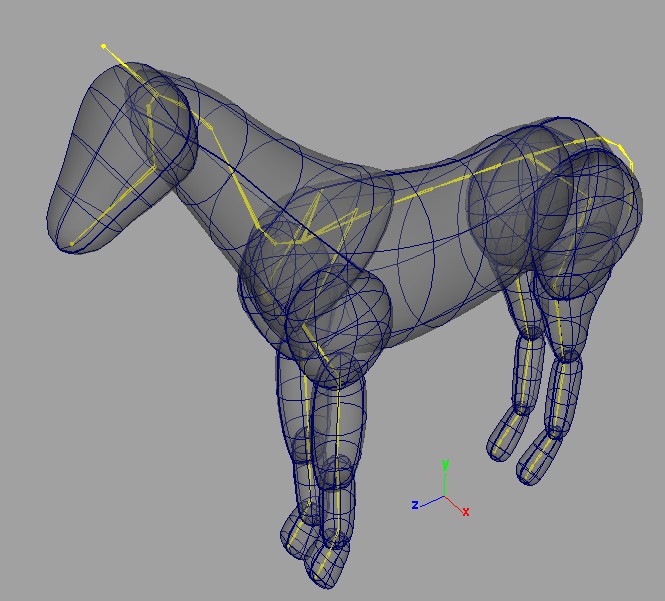
Exemple de
modèle ellipsoides
|
Exemple de
modèle ellipsoides |
Résumé:
Le but de ce stage est de construire un modèle
biomécanique simple de la locomotion des quadrupèdes pour
animer en 3D les phases principales de course et de saut. Il n’est bien
sûr pas demandé de rendre compte de la biomécanique
complexe de toutes les structures musculo-squelettiques mais
plutôt de modéliser les transferts de masses qui
apparaissent lors de la locomotion et du niveau de contrôle
moteur qu’il faut appliquer au système. On adoptera une
modélisation du corps de l’animal sous forme d’une
hiérarchie d’ellipsoïdes inertiels auxquelles une masse
sera affectée. Un système simple d’articulations entre
ces ellipsoïdes devra être développé pour
fournir le niveau de contrôle. L’estimation des paramètres
de contrôle du modèle se fera en alignant le modèle
sur des séquences vidéo d’animaux en mouvement. Ce sujet
complexe bénéficiera d’un large encadrement : il
s’inscrit dans le cadre d’un projet de recherche entre EVASION et le
Muséum National d’Histoire Naturelle à Paris. Une
infographiste professionnelle participe aussi à ce projet pour
la définition géométrique de modèle en
ellipsoïdes.
Bibliographie:
[1] Laurent Favreau, Lionel Reveret, Christine Depraz, Marie-Paule
Cani,
Animal Gaits From Video, ACM SIGGRAPH / Eurographics
Symposium on Computer Animation, SCA'04,
Grenoble, France, August 27-29, 2004.
[2] C. K. Liu, A. Hertzmann, Z. Popović,
Learning Physics-Based Motion Style with Nonlinear Inverse Optimization,
ACM Trans. on Graphics (Proc. SIGGRAPH 2005). Los Angeles, CA. pp.
1071-1081.
[3] C. K. Liu, Z. Popović,
Synthesis of Complex Dynamic Character Motion from Simple Animations,
ACM Transactions on Graphics (SIGGRAPH 2002).