- TOURNIER Maxime
- Né le 28 Septembre 1984
- Nationalité Française
Docteur en Informatique Graphique
Résumé
Dans cette thèse, nous proposons de nouvelles representations pour les
poses du mouvement humain, apprises sur des données réelles, en vue
d'une utilisation temps-réel. Dans une première partie, nous
exploitons des méthodes statistiques adaptées aux groupes de Lie pour
approximer la variété des poses d'un sujet en mouvement, à
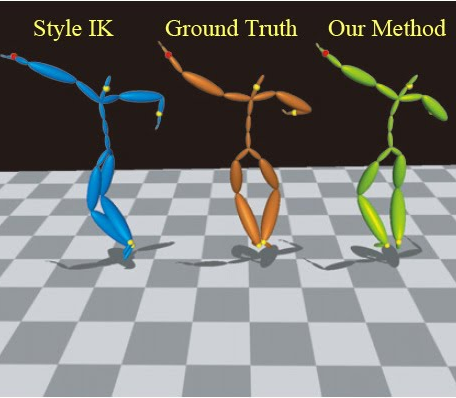
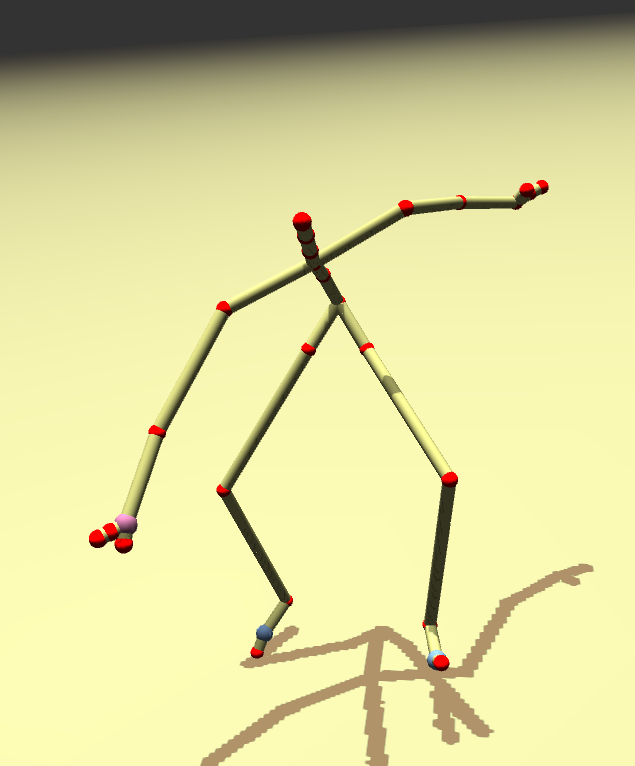
partir de données de capture de mouvement. Nous proposons un
algorithme de cinématique inverse exploitant cette paramétrisation
réduite, permettant par construction de synthétiser des poses proches
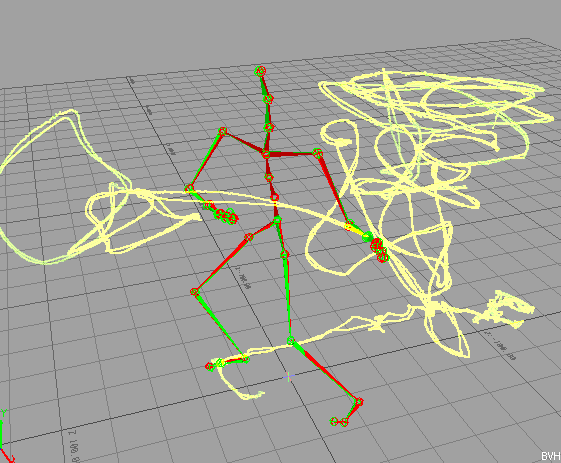
des données initiales. Nous validons ce modèle cinématique par une
application à la compression de données de mouvements, dans laquelle
seules quelques trajectoires de membres du squelettes permettent de
reconstruire une bonne approximation de l'ensemble des données
initiales.
Dans une deuxième partie, nous étendons cette approche à
l'animation physique de personnages virtuels. La
paramétrisation réduite fournit les coordonnées généralisées de la
formulation Lagrangienne de la mécanique. Nous dérivons un intégrateur
temporel explicite, basé sur les intégrateurs variationnels. Afin
d'améliorer la stabilité, nous proposons un modèle d'amortissement
inspiré de l'algorithme de Levenberg-Marquardt. Nous présentons
également une méthode géométrique d'apprentissage des limites
angulaires sur des données de capture de mouvement, ainsi et leur
application comme contraintes cinématiques.
Dans une troisième partie, nous abordons le problème du
contrôle du mouvement. En formulant les étapes de la
simulation physique d'une part et de la cinématique inverse d'autre
part comme deux programmes quadratiques, nous proposons un algorithme
de pseudo-contrôle par interpolation des métriques, permettant un
compromis intuitif entre simulation physique non-contrôlée et
cinématique inverse. Cette approche faisant intervenir des forces
externes, nous proposons une formulation alternative par relaxation du
problème théorique, non-convexe, en un programme quadratique
convexe. Ces algorithmes sont évalués sur des contrôleurs d'équilibre
et de suivi.
Publications
Expérience Professionnelle
|
2007 - présent
|
- Doctorant en informatique graphique
- Réduction de dimension pour la synthèse de mouvement humain
- Laboratoire Jean Kuntzmann
(équipe EVASION,
INRIA Rhône-Alpes, France)
|
|
2009 (6 mois)
|
- Doctorant en échange international
- Animation physique de personnages virtuels
- Collaboration avec Paul Kry
- Université de McGill, Montréal, Canada
|
|
2007 (5 mois)
|
- Stage de Master 2 Recherche
- Modélisation de données de capture de mouvements pour la compression
- Laboratoire Jean Kuntzmann
(équipe EVASION,
INRIA Rhône-Alpes, France)
|
|
2006 (5 mois)
|
- Stage ingénieur 3ème année
- Conception et développement d'une application d'annotation pour données MoCap
- Ubisoft, Montreuil, France
|
|
2005 (10 semaines)
|
- Stage ingénieur 2ème année
- Génie logiciel pour une simulation physique d'objets déformables
(SOFA)
- INRIA Rhône-Alpes, France
|
|
2005 (1 mois)
|
- Stage ingénieur 1ère année
- Développement d'une application de surveillance (SNMP) et son interface web
- WOPR-Hosting, Lausanne, Suisse
|
Formation
|
2007 - présent
|
|
|
|
2006 - 2007
|
- Master 2 Recherche: Image, Vision, Robotique
- Modélisation de données MoCap pour la compression d'animations 3D
- Institut National Polytechnique de Grenoble
(INPG), France
- Encadrant: Lionel Reveret
|
|
|
2003 - 2006
|
- Ingénieur ENSIMAG
- 3ème année: Imagerie et Réalité Virtuelle
- Ecole Nationale Supérieure d'Informatique et Mathématiques Appliquées de Grenoble
(ENSIMAG),
France
|
|
Compétences Techniques
| Expertise |
- Animation de personnages virtuels
- Simulation physique d'objets rigides articulés
|
| Programmation |
- C/C++, OCaml, Ruby, Java
- HTML/CSS, JavaScript, SQL
|
| Librairies |
- Boost, Qt, Eigen, OpenGL, OpenCV
|
| Systèmes d'exploitation |
- Unix (Linux, FreeBSD, MacOS)
- Windows (rudiments)
|
| Langues |
- Anglais (courant)
- Allemand (basique)
|
| Enseignement |
- Animation scientifique: programmation de jeux 2D pour des élèves de collège
- Algorithmique en OCaml: travaux pratiques, 1ère année de classe préparatoire INPG
|
Centres d'Intérêt
| Hobbies |
- Photographie
-
- Musique (Guitare), Lecture
|
| Sports |
Escalade, Randonnée, Snowboard
|
Last modified: Tue Oct 18 15:36:13 CEST 2011