|
Fabrice NEYRET - Maverick team, LJK, at INRIA-Montbonnot |
Nowadays 3D applications such as games and movies production
rely on highly detailed objects settling in large scenes. To avoid
the costly rendering of distant objects whose many details fall in
the same pixels - as well as too avoid aliasing
artifacts – distant objects are simplified into
« levels
of details » meshes. But micro-details (e.g.
shining ice crystal) can influence the whole pixel value, and a rough
or corrugated geometry still reflects differently even when its shape
seems flat. Similarly, a distant grid looks like a semi-transparent
panel : even if smaller than pixels bars cannot be simply
erased. This illustrates that the sub-pixel information can induce
emerging effects which should be explicitly expressed into a shader
function rather than being totally suppressed.
Our team has
published many researches
on appearance filtering. Some aimed at deep filtering of
well-characterized objects (such as E.Bruneton work on ocean waves or
trees), and some aimed at less deep filtering of more general
surfaces (E.Heitz work).
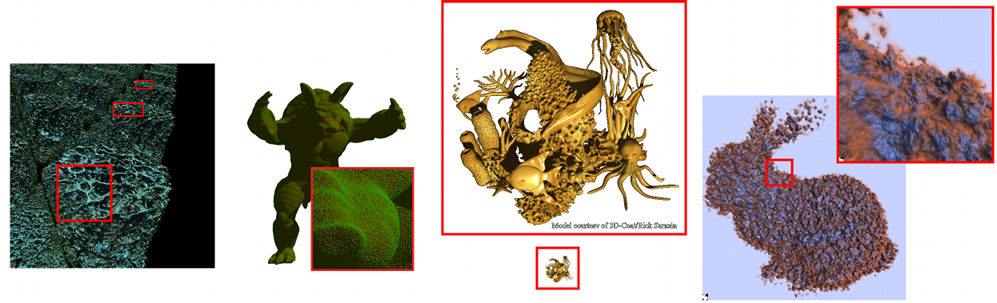
Our team also developed the voxel-based
scalable scene representation GigaVoxels
based on the fact that appearance filtering is well-posed using
voxels contrary to
meshes. Still, it is not sufficient to average sub-voxel data –
e.g., density - to obtain the averaged appearance
of a voxel.
This subject aims at addressing the problem above, by modeling
a shadable representation keeping enough of the subscale meaningful
information. At the scale of a pixel, appearance consists of colors,
opacity, polish and roughness (through highlights and shadowed small
valleys). All these can varies with view and light direction (as for
the distant grid and the corrugated surface mentioned above). These
global attributes may result from different values at subpixel scales
such as colored grains, rough geometry, thin openwork. Similarly,
they must be implicitly accounted for in coarser pixels appearance.
In order to be scalable
through many scales, we need a closed
representation, i.e., whose averaging can be encoded using
itself. In particular, some notions like “normals” are
not scalable but normal
distributions – e.g. lobes – are, and more
generally, histograms – or there statistical momentums. Notions
like « density » or « opacity »
loose too much key-information : for 2 voxels aligned with the
eye, the total opacity should not be the same whether their content
is consistently gathered on voxel-left, or left for first voxel and
right for the second, or scattered within each. So to voxelize a
solid object with correct appearance on the silhouette (partly-filled
voxels) we need a better but compact representation of the occlusion
in voxels. Another common case of correlated data are sheets with 2
different colored faces: seeing one is not seeing the other, so these
colors - but also their lighting - should not be mixed whatever the
pixel coarseness.
Several of the issues above have been addressed
in our previous work (see ref section) for surfaces. In this project
we target volumes of voxels, in order to complete the scalability
(with high quality) of the voxel representation. This will fully
allows real-time high quality walk-through very huge and detailed
scenes: let's break the complexity wall !
Math : skills in integration, Fourier or stats for images and textures would be a plus.
C/C++, OpenGL.
Notions of parallelism (multithreading) or GPU programming (GLSL, CUDA, etc) would be a plus, but these can be learn easily during the practice.
filtering surface appearance « Representing Appearance and Pre-filtering Subpixel Data in Sparse Voxel Octrees » HPG'2012
multiscale voxels : « GigaVoxels: Ray-Guided Streaming for Efficient and Detailed Voxel Rendering » I3D'09
multiscale lighing : « Interactive Indirect Illumination Using Voxel Cone Tracing » CGF'2011