Examen de Synthèse de mouvement
UJF-Grenoble, Maitrise d'Informatique, option IG3D
Avril 2003
Durée 1h30. À rendre sur copie séparée. Tous documents et calculatrices autorisés. La notation tiendra compte de la concision et de la qualité de rédaction des réponses. Le barème est indicatif.
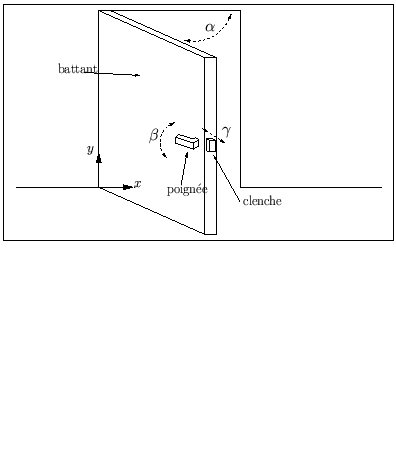
Dans ce devoir nous nous intéressons à la modélisation et à l'animation d'une porte. La porte (figure 1) est composée de trois parties mobiles: le battant, la poignée et la clenche (partie mobile qui rentre dans le mur pour maintenir la porte fermée), chacune possédant un degré de liberté.
Figure 1:
La porte et ses degrés de liberté. Notez le repère absolu de la scène en bas à gauche.
|
|
Question 1 (1 point)
Dessinez le graphe cinématique de la porte, en faisant apparaitre les degrés de liberté des repères mobiles. Ne faites pas figurer de dimensions.
Par la suite, le battant sera modélisé par un parallélépipède de largeur 1m, de hauteur 2m, et d'épaisseur 5cm. La poignée sera modélisée par trois cylindres, le premier orthogonal au battant et sortant de 5cm de chaque côté, les deux autres parallèles au battant et fixés aux extrémités du battant. La clenche sera modélisée par un parallélépipède de largeur 5cm, de hauteur 2cm et d'épaisseur 1cm.
Question 2 (5 points)
Écrivez un graphe de scène OpenInventor modélisant la porte comme indiqué, en utilisant comme noeuds de forme le
SoCube et le
SoCylinder. Indiquez les valeurs numériques associées aux transformations géométriques, qui pourront comme d'habitude porter sur les translations, rotations et dilatations.
On rappelle que:
- un SoCube est centré sur l'origine repère local, aligné suivant les axes du repère, et ses arètes s'étendent de
 à
à  dans chaque direction.
dans chaque direction.
- un SoCylinder est centré à l'origine repère local, a son axe parallèle à l'axe
 , a pour rayon
, a pour rayon  et pour longueur totale
et pour longueur totale  (il s'étend de à dans chaque direction).
(il s'étend de à dans chaque direction).
On prévoira un matériau différent pour chaque élément, sans en préciser les valeurs numériques.
Nous désirons représenter l'animation de la porte qui s'ouvre. Ce mouvement s'effectue en trois phases, en partant d'une position fermée, poignée au repos, clenche enfoncée dans le mur (dépasse de 2cm de la porte):
- pendant un intervalle de temps
 , la poignée pivote de 45 degrés vers le bas et la clenche rentre dans la porte, tandis que le battant reste immobile.
, la poignée pivote de 45 degrés vers le bas et la clenche rentre dans la porte, tandis que le battant reste immobile.
- pendant un intervalle de temps
 , le battant pivote de 120 degrés tandis que la clenche et la poignée sont immobiles.
, le battant pivote de 120 degrés tandis que la clenche et la poignée sont immobiles.
- pendant un intervalle de temps
 , la poignée et la clenche retrouvent leur position de repos, tandis que le battant est immobile.
, la poignée et la clenche retrouvent leur position de repos, tandis que le battant est immobile.
Question 3 (1.5 points)
Pour chacun des degés de liberté

,

et

, représentez le mouvement au cours du temps par des courbes avec en abcisse le temps et en ordonnées les valeurs. Vous pouvez vous contenter de mouvements linéaires (pas de cubiques) dans cette question.
Nous considérons maintenant qu'un mouvement réaliste de la porte implique une phase d'accélération et une phase de décélération.
Question 4 (1.5 points)
Dessinez l'allure de la courbe correspondante et proposez une modélisation par courbe(s) de Hermite, en faisant figurer les valeurs numériques (valeurs, pentes)
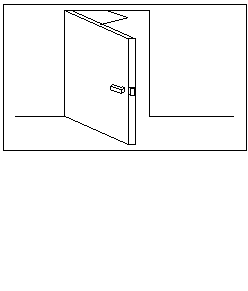
Nous désirons équiper la porte d'un "groom", mécanisme à deux barres reliant la porte au mur et chargé de refermer la porte automatiquement, comme illustré sur la figure 2.
Figure 2:
La porte et son groom.
|
|
Question 5 (2 points)
Dessinez le graphe cinématique de la porte avec le groom, et discutez brièvement (cinq lignes maxi) du choix de modélisation que vous effectuez.
Question 6 (2 points)
Expliquez brièvement (cinq lignes maxi) le principe général des méthodes de cinématique inverse.
Nous voulons que la porte s'ouvre automatiquement au passage d'un personnage, reste ouverte le temps nécessaire, puis se referme. Nous disposons d'un capteur émettant un signal binaire  vrai si et seulement si un personnage est détecté à proximité de la porte.
vrai si et seulement si un personnage est détecté à proximité de la porte.
Question 7 (3 points)
Représentez le comportement de la porte par un automate en indiquant les actions associées aux états et les conditions de transition.
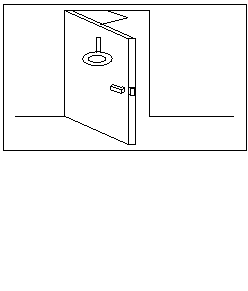
Nous désirons décorer notre porte à l'aide d'une couronne accrochée par un ruban comme illustré sur la figure 3. Cette décoration sera animée physiquement par souci de réalisme.
Figure 3:
La porte et la couronne.
|
|
Question 8 (4 points)
Proposez un modèle physique pour le ruban et la couronne. Précisez la nature des actions et interactions exercées sur les divers éléments, les surfaces de collisions, les parmètres physiques globaux...
Francois Faure
2003-04-16