Mes travaux de recherche portent sur la simulation dynamique interactive pour corps poly-articulés, plus particulièrement les robots humanoïdes. Les simulateurs jouent un rôle essentiel dans le développement des robots humanoïdes car ils permettent de valider les modèles physiques développés. Les robots sont appelés à évoluer dans des environnements complexes impliquant du contact frottant. De fait, un bon simulateur doit traiter les problèmes de contact frottant de manière réaliste et rapidement.
Pour résoudre les problèmes de contact, nous utilisons les méthodes par contraintes. Ces méthodes incluent explicitement les contraintes de non pénétration dans les équations de la dynamique. On peut montrer que l'accélération des points de contacts est une fonction linéaire des efforts de contact. Couplé aux contraintes, ce problème forme un Problème de Complémentarité Linéaire (LCP).
L'ajout des frottements de Coulomb complexifie le problème car la loi de frottement est non-linéaire. Par conséquent, la formulation LCP ne peut etre gardée, à moins de discrétiser la loi de Coulomb. Cependant, discrétiser signifie augmenter le temps de calcul et en meme temps en réduire la précision. Nous avons préféré les méthodes itératives, plus particulièrement les méthodes de type Gauss-Seidel, qui ne nécessitent pas la discrétisation. Notre algorithme global est quadratique en nombre de points de contacts. En présence d'un faible nombre de points de contacts (une trentaine), nous avons des simulations temps-réel.
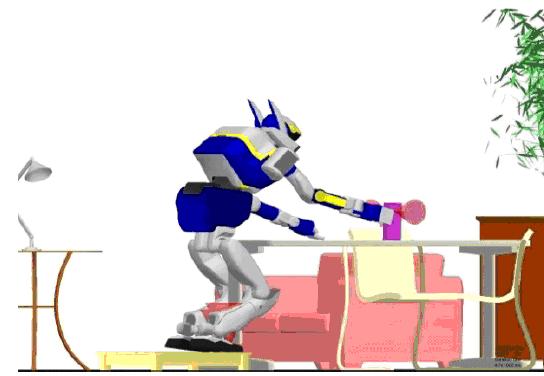
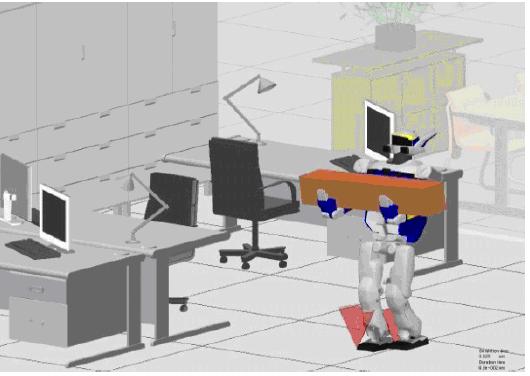
Le simulateur a été développé au sein du Joint Japanese-French Robotics Laboratory (JRL), Japon. Le modèle utilisé pour les simulations est celui du robot humanoïde HRP-2. Nous avons testé différents scénarions impliquant des environnements complexes et de la manipulation.
 |
 |
HRP-2 attrape l'objet sur la table Voir la vidéo (MPEG-1 3.46Mo) |
HRP-2 porte un objet lourd puis tombe Voir la vidéo (MPEG-1 1.92Mo) |
Ce travail a été réalisé en collaboration avec Sylvain Miossec, Post-Doc au JRL, Japon.

Les utilisateurs du simulateur peuvent souhaiter interagir avec l'environnement virtuel pour réaliser par exemple dse taches collaboratives. Il est alors nécessaire d'intégrer un dispositif à retour d'effort. Nous avons choisi le Phantom OMNI commercialisé par Sensable Technologies. Ce dispositif possède six degrés de liberté de mouvement et trois de retour d'effort.
Nous pouvons réaliser deux types d'interaction : le toucher et la manipulation. Pour la manipulation, nous utilisons un modèle de ressort-amortisseur placé entre le pointeur haptique et l'objet manipulé.
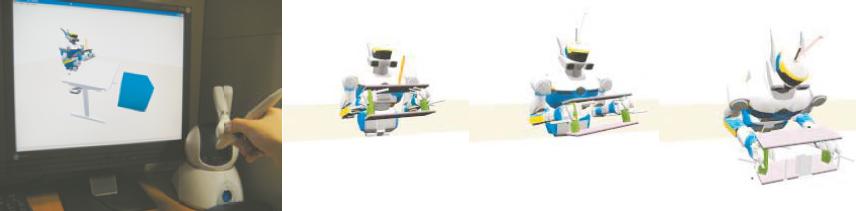 |
Interaction avec HRP-2 manipulant un objet |
Dans la premiere partie de mes recherches je me suis intéressé uniquement à la dynamique des corps poly-articulés à joints à un degré de liberté. Cependant, notre simulateur devrait pouvoir simuler tous types de corps poly-articulés, en particulier les corps à joints à plusieurs degrés de liberté tels que les humains. Nous avons étendu notre algorithme de dynamique en intégrant les joints sphériques. La méthode utilisée est les quaternions car les autres méthodes (angles d'Euler, formulation exponentielle) ne nous ont pas donné des résultats satisfaisants, en particulier, nous avons observé des divergences autour des configurations singulières. Ce travail a été réalisé en collaboration avec Francois Keith, thésard a l'Université d'Evry, France. |
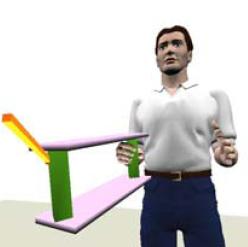 |
Avatar humain virtuel |