I am currently working on an interactive dynamics simulator for multi-body systems, especially humanoid robots. Simulation is a major tool for the development of humanoid robots as it allows validating physicals models that are developed. As robots are aimed to move in complex environments, involving contact with friction, the main challenge in simulation is how to integrate frictional contact in a proper manner and fastly.
To solve contact problems, we are using constraint-based methods. Basically these methods integrates explicitly non-penetration constraints in the dynamic equations. It can be shown that the acceleration of contact points is a linear function of contact forces. Coupled with the constraints, this problem is a Linear Complementarity Problem (LCP).
Adding Coulomb friction is not an easy issue as it is non-linear. Hence the LCP formulation cannot be kept unless discretization is made. However discretizing means increase computation time as well as decrease accuracy. Thus, we use iterative methods, more specifically Gauss-Seidel like methods, that allows keeping exact friction cones. The global algorithm complexity is quadratic in number of contact points but for few contact points (around 30 points), we get real-time simulations.
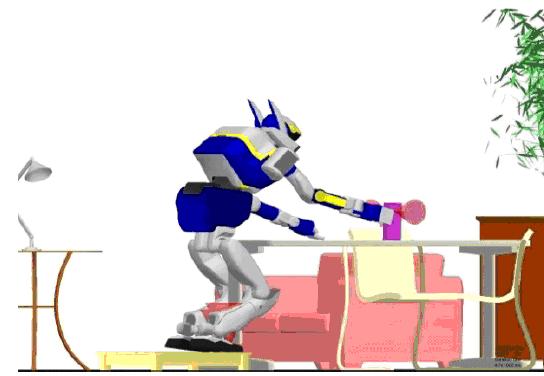
The simulator has been developed at the Joint Japanese-French Robotics Laboratory (JRL), Japan.The HRP-2 humanoid robot is used for simulations. We tested different scenarios involving complex environment and manipulation tasks.
 |
 |
HRP-2 reaches an object on a table See the video (MPEG-1 3.46MB) |
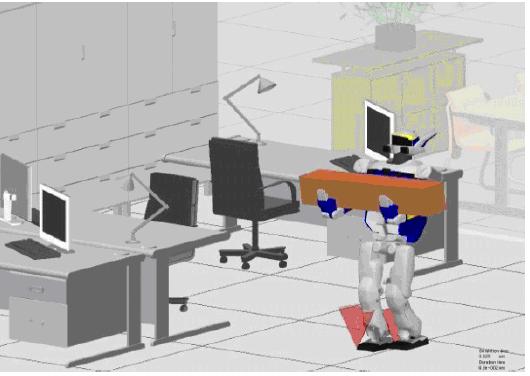
HRP-2 carries a heavy box and falls down See the video (MPEG-1 1.92MB) |
This work was done in collaboration with Sylvain Miossec, Post-Doc at JRL, Japan.

Users may wish to interact with the virtual environment to perform for example collaborative tasks. This can made by integrating a haptic device with force feedback. We integrated the Phantom OMNI device commercialized by Sensable Technologies. This device has six degrees of freedom of movement and three degrees of freedom of force feedback.
Basically we can perform two kinds of interaction: touching and dragging. For dragging we use a spring-damper model between the haptic probe and the dragged object.
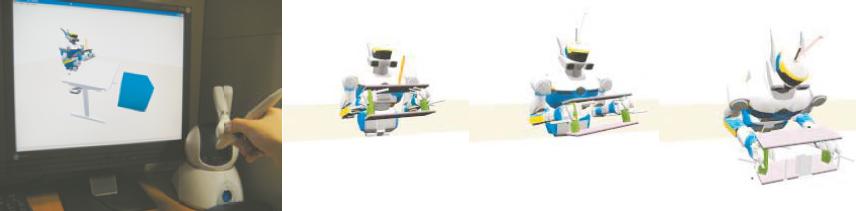 |
Interaction with HRP-2 manipulating an object |
interaction
In the first part of my research, I focused on the dynamics of single DOF multibody systems such as humanoid robots. However, our simulator should be able to simulate all kinds of multibody systems such as multi DOF systems, for instance human avatars. We extended our dynamic simulator by including spherical joints. We are using quaternions because other methods (Euler angles, exponential map) did not give satisfying results, for instance, we observed some divergence around singular configurations. This work was done in collaboration with Francois Keith, Ph.D student at Evry University, France. |
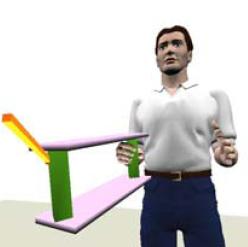 |
Virtual human avatar |