AnimaL |
Tutorial |
Documentation |
#include <fastoctreedeformableconstrained.h>
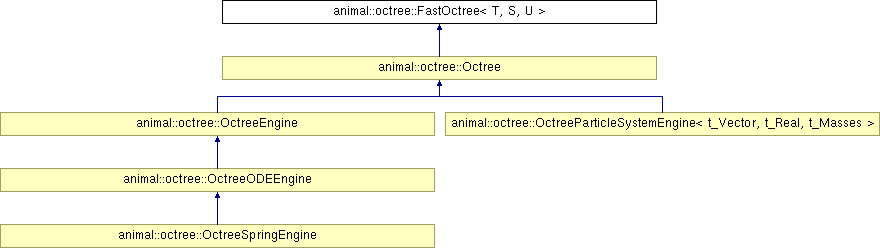
Inheritance diagram for animal::octree::FastOctree< T, S, U >:
This octree perform vertex sharing, that is, cells of the octree store pointer to points instead of point. Thus, points that belong to several cell are only "created" once and referred by all concerned viewcells. This is useful, along with the fact that the point type is a template parameter of the class to store per-vertex information in the octree.
The octree cells also store a pointer to arbitrary data, whose type is the second template parameter of the FastOctree class.
The FastOctree class is just a wrapper that is needed to access the root cell of an octree. The important class is FastOctree::Cell.
Here is how to draw an octree using openGL:
Here is a code snippet to locate the leaf cell in which a given point P is located. The example also shows how the data type can be used to store in each cell the list of pointtemplate<class T,class S,class U> void drawCell(FastOctree<T,S,U>::Cell* cell) { if (!cell->isLeaf()) { for(short i=0;i<8;++i) { drawCell(cell->child(i)); } } else { glBegin(GL_QUADS); for (unsigned short i=0;i<6;++i) { Octree::Face face = cell->face(i); glNormal3fv(face.normal()); glVertex3fv(*(face.vertex(0))); glVertex3fv(*(face.vertex(1))); glVertex3fv(*(face.vertex(2))); glVertex3fv(*(face.vertex(3))); } glEnd(); } } template<class T,class S,class U> void drawOctree(FastOctree<T,S,U>* o) { if (o->root()) drawCell(o->root()); }
Note that the template parameter allows to search for point of type different than the point type of the octree. The only requirement is that typetypedef FastOctreeCell<Vec3,list<Vec3> > Octree; Octree octree(Vec3(-1.0f,-1.0f,-1.0f),2.0f); // ...... // Here octree is subdivided // ....... P[3] = { 0.5f,0.3f,0.4f }; // The point to localize Octree::Cell* root = octree->root(); Octree::Cell* child = root->locate(P); while (child && child != root) { child = (root=child)->locate(P); } if (child != NULL) { cout<<" point P is in cell whose diagonale is " <<child->vertex(0)<<"-"<<child->vertex(7)<<endl; (*child)->data->push_back(P); }
U defines operator: Here is a more sophisticated version where a set of points is localized in an octree, each cell of the octree remembering which points are in. The points are localized in the tightest octree's cell containing them. Tightness is indicated by a maximum subdivision depth. This time, the octree therefore needs to be subdivided along with the subdivision process.
typedef FastOctreeCell<Vec3,list<Vec3> > Octree; const int max_depth = 10; vector<Vec3> points; Octree* octree; // ...... // Here the points vector is filled and the octree is created // with correct size to contain all the points. // ....... for(int i=0;i<points.size();++i) { const Vec3& P = points[i]; int depth = 0; Octree::Cell* cell = octree->root(); while (depth < depth_max && cell != NULL) { ++depth; cell->subdivide(); cell = cell->locate(P); } if (cell != NULL) { (*cell)->push_back(P); } else { // This case should not occur if the octree's root cell has been // created with a sufficient size. cout<<"WARNING: I can't locate point (seems to be outside)"<<endl; } }
Definition at line 152 of file fastoctreedeformableconstrained.h.
Public Types | |
| typedef T | Vertex |
| typedef Vertex * | VertexPtr |
| typedef S | Data |
Public Member Functions | |
| FastOctree (Cell *root) | |
| FastOctree (const U &min, const FloatingPointType &size, const S &defaultData=S()) | |
| FastOctree (const U &min, const FloatingPointType &,const FloatingPointType &,const FloatingPointType &, const S &defaultData=S()) | |
| virtual | ~FastOctree () |
| Cell * | root () const |
Static Public Member Functions | |
| unsigned short | vertexIndex (unsigned short i, unsigned short j, unsigned short k) |
| unsigned short | childIndex (unsigned short i, unsigned short j, unsigned short k) |
Public Attributes | |
| Cell * | root_ |
Static Public Attributes | |
| const bool | hasBrotherAlongFace [8][6] |
| const bool | hasBrotherAlongEdge [8][12] |
| const unsigned short | alongFace [8][6] |
| const unsigned short | alongEdge [8][12] |
| const unsigned short | supportingFace [8][12] |
| const bool | hasOnFatherEdge [8][12] |
| const unsigned short | childrenSharingFace [6][4] |
| const unsigned short | alterEgoFace [6] |
| const unsigned short | faceVertices [6][4] |
| const unsigned short | verticesConnectedFaces [8][3] |
| const unsigned short | directionForVertexOnEdge [8][8] |
| const unsigned short | directionForVertexOnFace [8][8] |
|
|||||
|
The type of the data that one can associate with each cell of an octree. Definition at line 191 of file fastoctreedeformableconstrained.h. Referenced by animal::octree::FastOctree< T, S, U >::Cell::getData(), animal::octree::FastOctree< T, S, U >::Cell::operator *(), animal::octree::FastOctree< T, S, U >::Cell::operator->(), and animal::octree::FastOctree< T, S, U >::Cell::setData(). |
|
|||||
|
the 3D point type used in the octree. Its requirements is to have:
Definition at line 167 of file fastoctreedeformableconstrained.h. |
|
|||||
|
Definition at line 168 of file fastoctreedeformableconstrained.h. |
|
||||||||||
|
|
|
||||||||||||||||||||
|
|
|
||||||||||||||||||||||||||||
|
|
|
|||||||||
|
|
|
||||||||||||||||||||
|
|
|
|||||||||
|
||||||||||||||||||||
|
|
|
|||||
|
Definition at line 215 of file fastoctreedeformableconstrained.h. |
|
|||||
|
Definition at line 214 of file fastoctreedeformableconstrained.h. |
|
|||||
|
Definition at line 219 of file fastoctreedeformableconstrained.h. |
|
|||||
|
Definition at line 218 of file fastoctreedeformableconstrained.h. |
|
|||||
|
Definition at line 222 of file fastoctreedeformableconstrained.h. |
|
|||||
|
Definition at line 223 of file fastoctreedeformableconstrained.h. |
|
|||||
|
Definition at line 220 of file fastoctreedeformableconstrained.h. |
|
|||||
|
Definition at line 213 of file fastoctreedeformableconstrained.h. |
|
|||||
|
Definition at line 212 of file fastoctreedeformableconstrained.h. |
|
|||||
|
Definition at line 217 of file fastoctreedeformableconstrained.h. |
|
|||||
|
Definition at line 228 of file fastoctreedeformableconstrained.h. |
|
|||||
|
Definition at line 216 of file fastoctreedeformableconstrained.h. |
|
|||||
|
Definition at line 221 of file fastoctreedeformableconstrained.h. |
 1.3.6
1.3.6